
悬挂轨道式巡检机器人的组成
时间:2022-03-30 11:00:28 I 发布者:
悬挂轨道式巡检机器人的组成室内轨道型智能巡检机器人主要由控制中心、运动机构、轨道总成、升降运动机构以及视、音频设备等五大部分组成,所搭载的各类摄像机、拾音器设备在采集了相
室内轨道型智能巡检机器人主要由控制中心、运动机构、轨道总成、升降运动机构以及视、音频设备等五大部分组成,所搭载的各类摄像机、拾音器设备在采集了相应的数据后,通过系统的数据传输通道(有线、无线、载波等方式),将网络数字信号或模拟信号传输给监控中心的控制平台; 支持TCP/IP网络或RS485串行通信模式直接控制,实现监控平台的在线控制功能。
1)运行轨道
室内轨道式智能巡检机器人沿着室内顶部铺设的工字铝轨道运行。机器人行走导轨选择在室内顶端敷设轨道,机器人在轨道上运行,不影响下方通道的人员通行。
2)移动平台
机器人终端运动平台采用电机驱动、摩擦轮提供动力的方式进行。摩擦轮与工型轨道接触,通过自身重力与轨道压牢,产生较大的摩擦力。摩擦轮材质耐磨,且与铝合金工型轨道面之间有较大的摩擦系数,以便提供较大的驱动力。
3)升降机构
升降机构以对称式的两根固定升降云台进行升降。升降机构设置了限位,当机器向下运动时,碰到人或物体时机器会自动停止下降,以此避免发生机器撞坏或人体受到伤害。收回状态的高度与行程成正比。
4)摄像机
摄像机是挂载设备,可以挂载不同的摄像机。
轨道巡检机器人的技术参数
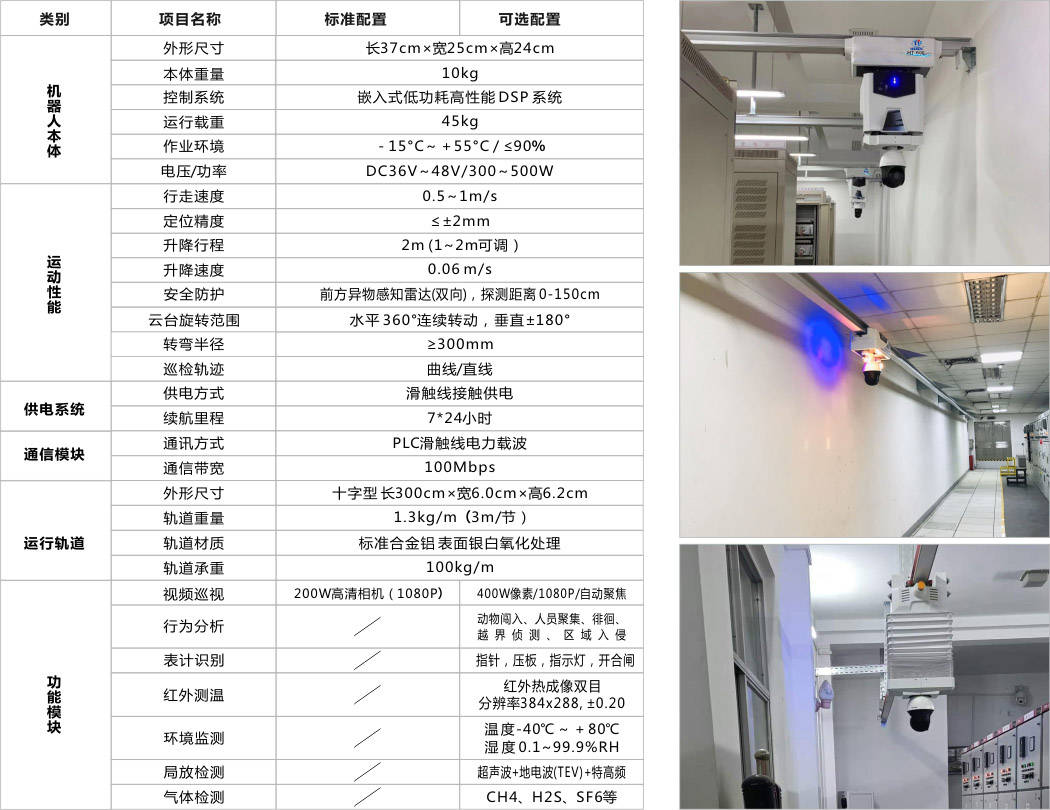 轨道巡检机器人的技术参数
轨道巡检机器人的技术参数

联系我们
地址:北京市海淀区知春路豪景大厦B1001室
电话:010-62104284

扫描关注微信
©Copyright 2022 北京海瑞思科技有限公司 版权所有 请勿转载